

Summary


WO/2017/196199
Details
International patented invention
International patented invention
01. General Data
The revolution begins...
VEHICLE PROVIDED WITH A MOVING SYSTEM AND
METHOD OF MOVING A VEHICLE
Reveal RMH Project Car Build Plan
Simply and understandably!.
METHOD OF MOVING A VEHICLE
Reveal RMH Project Car Build Plan
Simply and understandably!.
- Registration Numbers
-
Invention Number:
WO/2017/196199
International Application No:
PCT/RO2017/000007
Date: 16.11.2017
- IPC
-
BB60G 7/00 2006.1
B60G 7/02 2006.1
B62D 57/02 2006.1
B62D 57/032 2006.1
- CPC
-
B60G 2202/44
B60G 2204/143
B60G 2300/40
B60G 7/003
B60G 7/02
B62D 57/022
B62D 57/032
- Inventor
- Adrian Rosca
- Priority Data
- a 2016 00340 12.05.2016 RO
02. Abstract
Technical data
Anti-MUD
Anti-SAND
Anti-SNOW SYSTEM
100% GREEN CAR
Powered by AIR
Anti-SAND
Anti-SNOW SYSTEM
100% GREEN CAR
Powered by AIR
Green Car powered by compressed-air
The inventions refers to a motor vehicle (V) comprising a chassis (S), a plurality of wheels (1a, 1 b, 1c, 1d), each wheel being provided respectively with a breaking device (3a, 3b, 3c, 3d) with which the wheel can be immobilized, a body (C) fixed solidarly to the chassis (S) of the motor vehicle (V), a moving assembly fixed to the body (C), by which at least one wheel (1a, 1 b, 1c, 1d) can be moved relative to the body (C) and to the chassis (S) in the straight line moving direction of the motor vehicle, between a first extreme position and a second extreme position the motor vehicle (V) having a track and a ground clearance, each with a pre-set value, the moving assembly being capable to move the chassis (S), in the straight line moving direction of the motor vehicle (V), relative to said at least one wheel (1a, 1 b, 1c, 1d) when the at least one wheel (1a, 1b, 1c, 1d) is immobilized, the pre-set values of the track and respectively of the ground clearance of the motor vehicle (V) remaining unmodified, all the time and irrespective of the position of any of the wheels.
The inventions refers to a motor vehicle (V) comprising a chassis (S), a plurality of wheels (1a, 1 b, 1c, 1d), each wheel being provided respectively with a breaking device (3a, 3b, 3c, 3d) with which the wheel can be immobilized, a body (C) fixed solidarly to the chassis (S) of the motor vehicle (V), a moving assembly fixed to the body (C), by which at least one wheel (1a, 1 b, 1c, 1d) can be moved relative to the body (C) and to the chassis (S) in the straight line moving direction of the motor vehicle, between a first extreme position and a second extreme position the motor vehicle (V) having a track and a ground clearance, each with a pre-set value, the moving assembly being capable to move the chassis (S), in the straight line moving direction of the motor vehicle (V), relative to said at least one wheel (1a, 1 b, 1c, 1d) when the at least one wheel (1a, 1b, 1c, 1d) is immobilized, the pre-set values of the track and respectively of the ground clearance of the motor vehicle (V) remaining unmodified, all the time and irrespective of the position of any of the wheels.

Description
Apply Succesfully on declivity of over 45°
Able to apply successfully at the rolling on a slope/ramp,
for example on a slope/ramp with a declivity of over 45°.
for example on a slope/ramp with a declivity of over 45°.
01. Detailed Data
Designing the future
The invention refers to a motor vehicle provided with a moving system and to a method of moving a motor vehicle, so that the motor vehicle has the possibility of moving after it has initially been stuck/aground on a surface covered, for example, with mud, snow, ice, sand, or in case it has to climb up or climb down on a surface with a declivity of more than 45°.
Document US20090206573A1 discloses a damper system for motor vehicles, designed such that the axles of the wheels are adjustable in length, fact that leads to the possibility of variation of the size of the track (the track is defined as the distance between the wheels of the same axle of a motor vehicle) and/or of the wheel base (the wheel base is defined as the distance between the axes of the extreme axles of a motor vehicle) and/or of the ground clearance (the ground clearance is defined as the height of the chassis as opposed to the rolling surface).
Document FR2844245A1 discloses a motor vehicle whose track, wheel base and ground clearance can be variable.
All the solutions from the above mentioned documents have the disadvantage that they do not solve the problem of the unblocking of the motor vehicle if it has been stuck in mud, snow, ice, sand, or on a ramp/slope with a big declivity, for example of 45° or bigger.
The technical problem solved by the invention is the moving of the motor vehicle if it has initially got stuck in mud, snow, ice, sand or on a ramp/slope with a big declivity, without the modification of the track and of the ground clearance.
Document US20090206573A1 discloses a damper system for motor vehicles, designed such that the axles of the wheels are adjustable in length, fact that leads to the possibility of variation of the size of the track (the track is defined as the distance between the wheels of the same axle of a motor vehicle) and/or of the wheel base (the wheel base is defined as the distance between the axes of the extreme axles of a motor vehicle) and/or of the ground clearance (the ground clearance is defined as the height of the chassis as opposed to the rolling surface).
Document FR2844245A1 discloses a motor vehicle whose track, wheel base and ground clearance can be variable.
All the solutions from the above mentioned documents have the disadvantage that they do not solve the problem of the unblocking of the motor vehicle if it has been stuck in mud, snow, ice, sand, or on a ramp/slope with a big declivity, for example of 45° or bigger.
The technical problem solved by the invention is the moving of the motor vehicle if it has initially got stuck in mud, snow, ice, sand or on a ramp/slope with a big declivity, without the modification of the track and of the ground clearance.
- Impossible to be stuck
-
Cars, trucks or even military tanks stuck in mud, snow or sand??
Impossible to be stuck in mud with RosMar H Patented System
Problem solved even for big declivity of more than 45°!
- 100% GREEN
-
RosMar H Green Power Car is powered by compressed-Air 100% Green!
- Acceleration
- RosMar H Green Power Car will break the acceleration world record!
Drawings
RMH Green Power Car Project Drawings


RosMar H Green Power working principle
The motor vehicle, according to the invention, comprises a chassis, a plurality of wheels, each wheel being provided with a breaking device with which the wheel can be immobilized, a body fixed solidarily to the chassis of the motor vehicle, a moving assembly fixed to the body, by which at least one wheel can be moved relative to the body and to the chassis in the straight line moving direction of the motor vehicle, between a first extreme position and a second extreme position, the motor vehicle having a track and a ground clearance, each of them with a pre-set value, in which the moving assembly can move the chassis in the straight line moving direction of the motor vehicle, relative to the at least one wheel, when the at least one wheel is immobilized, the pre-set values of the track and respectively of the ground clearance of the motor vehicle remaining unmodified, all the time and irrespective of the position of any of the wheels.
The advantages of the present invention are:
- the motor vehicle can overcome the blockages caused by mud, snow, ice, sand, etc.
- the motor vehicle can overcome ramps and slopes of more than 45°
- the motor vehicle doesn't modify its track and ground clearance
- there are no major modifications of the motor vehicle
- the motor vehicle is controlled by the driver exclusively from the inside of the vehicle
The following embodiments of the invention, related to figures 1-12, represent:
Fig. 1 : The motor vehicle according to the first embodiment, in the initial position in which it is supposed that it got stuck
Fig. 2-6: The motor vehicle according to the first embodiment, respectively in the first five successive moving positions
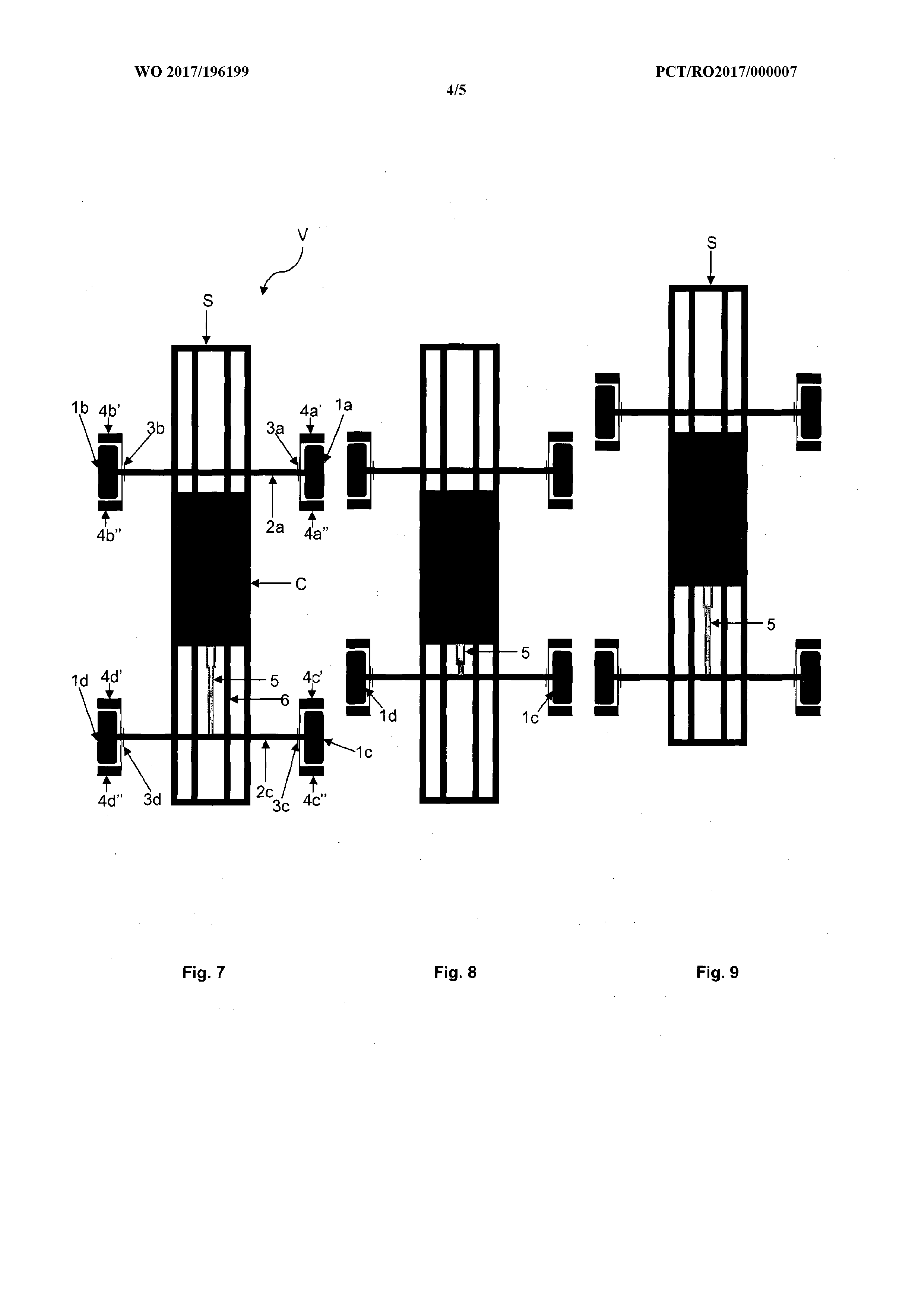
Fig. 7: The motor vehicle according to the second embodiment, in the initial position in which it is supposed that it got stuck
Fig. 8-9: The motor vehicle according to the second embodiment, respectively in the first two successive moving positions
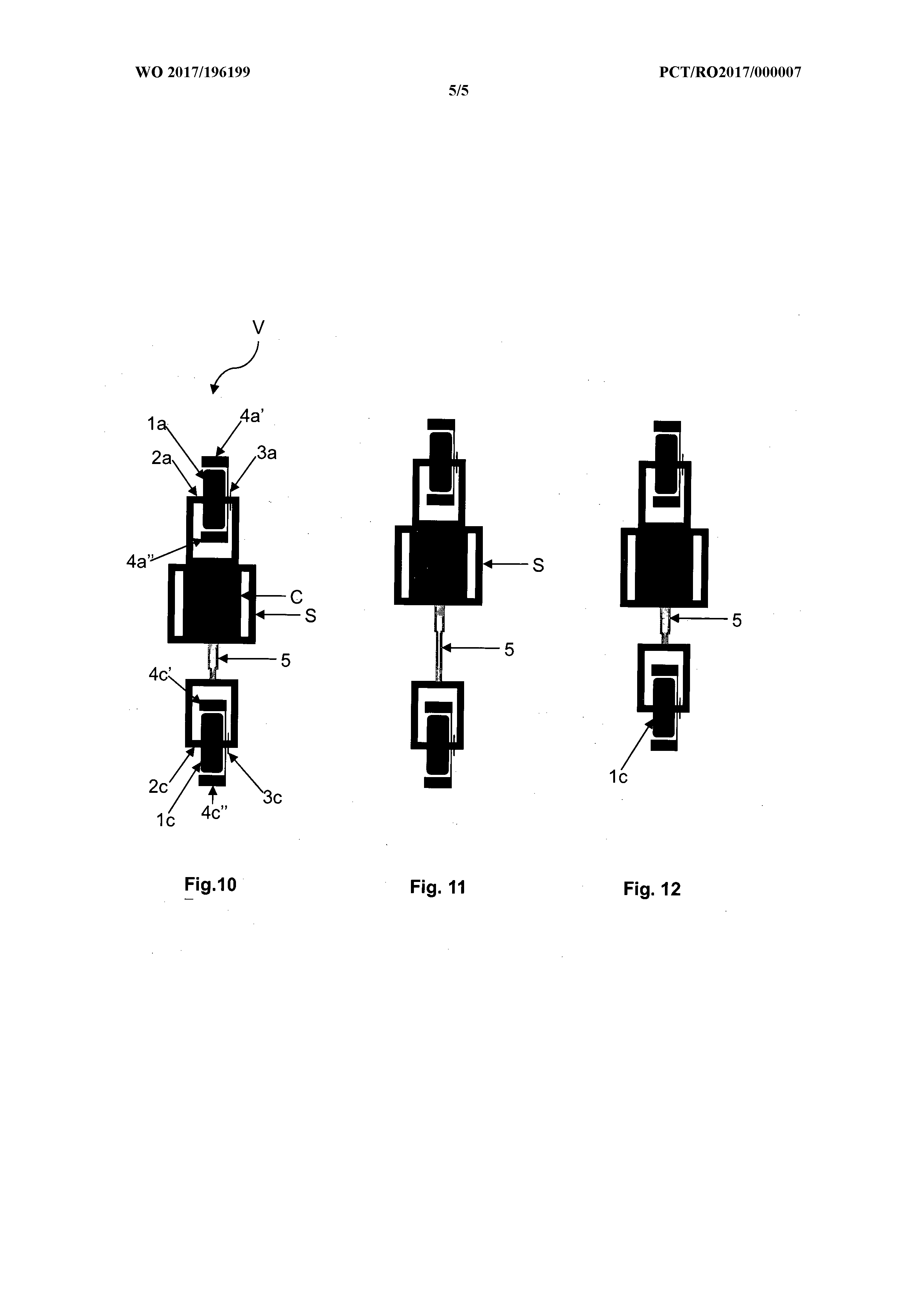
Fig. 10: The motor vehicle according to the third embodiment, in the initial position in which it is supposed that it got stuck
Fig. 11-12: The motor vehicle according to the third embodiment, respectively in the first two successive moving positions
The first embodiment of the motor vehicle according to the invention is represented schematically in figures 1-6.
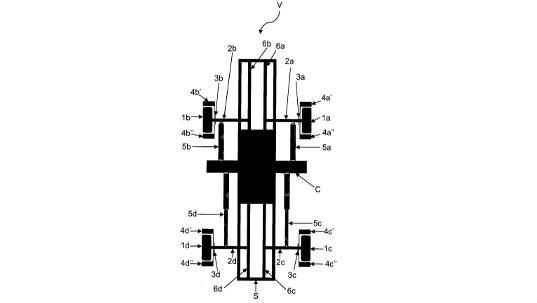
The motor vehicle V is provided with a pair of front wheels 1a, 1b and with a pair of rear wheels 1c, 1d, each wheel of each pair of wheels being mounted respectively on an axle 2a, 2b, 2c, 2d, and respectively provided each with a breaking device 3a, 3b, 3c, 3d.
Preferably, each wheel can be further provided with two automatic wheelchocks, 4a', 4a", 4b', 4b", 4c', 4c", 4d', 4d" that can block the wheel in the forward sense of driving, respectively in the backwards sense of. driving of the motor vehicle. Each axle 2a, 2b, 2c, 2d is actuated respectively by a moving device 5a, 5b, 5c, 5d fixed at one of its ends to the associated axle and fixed at its other end to a body C fixed solidarly to the chassis S of the motor vehicle.
The assembly comprising one or more moving devices 5a, 5b, 5c, 5d will be hereinafter named moving assembly. A moving device can be, as an unlimitating example, a pneumatic cylinder with a double sense. The body C, being fixed solidarly to the chassis S, is always moving or staying still together with chassis S. By means of the associated moving device, each axle 2a, 2b, 2c, 2d can slide, independently, in the straight line moving direction of the motor vehicle, respectively on a sliding support 6a, 6b, 6c, 6d fixed solidarly to the chassis S, determining this way that each wheel 1a, 1b, 1c, 1d to move independently in the straight line moving direction of the motor vehicle, between a first extreme position named hereinafter restrained position, in which the wheel is situated at a minimum distance relative to the body C and a second extreme position named hereinafter advanced position, in which the wheel is situated at a maximum distance relative to the body C.
When the wheels 1c, 1d are immobilized (in some cases even when only one wheel is immobilized, for instance wheel 1c) and the wheels 1a, 1b are free (mobile), the moving assembly comprising the moving devices 5c and 5d can move the chassis S in the straight line moving direction of the motor vehicle V, relative to the pair of wheels 1c, 1d, keeping unmodified the track and the ground clearance of the motor vehicle V, all the time and irrespective of the position of the wheels.
In normal traffic conditions, such as the rolling on an asphalted road, the motor vehicle V can roll, for example, with the two front wheels 1a and 1b in restrained position and with the two rear wheels 1c and 1d in advanced position, as shown in figure 1. Also, the motor vehicle can roll either with the wheels 1a and 1b in advanced position and with the wheels 1c and 1d in restrained position, or with all the wheels in advanced position, or with all the wheels in restrained position.
In certain cases, the motor vehicle can get stuck (for instance with the wheels in the position in figure 1), for example because of the skidding of the wheels on a surface covered in mud, snow, ice, sand, or on a ramp/slope with a big declivity, etc. In such cases, the motor vehicle according to the first embodiment of the invention cannot depart from its place in the normal (conventional) way but it has the possibility of moving sequentially according to the following method:
a) in the first step, the first moving device 5a is actuated so that the first front wheel 1a reaches, by moving the wheel 1a and keeping in place the chassis S, from the restrained position in the advanced position, such as shown in figure 2. For executing this maneuver, it is possible that it is necessary that one or more of the other wheels 1b, 1c, 1d to be immobilized by breaking with the help of the associated breaking device 3b, 3c, respectively 3d, and/or locked by means of the associated automatic wheelchocks 4b', 4b", 4c', 4c"; respectively 4d', 4d". In the case when, as a consequence of this maneuver of moving the wheel 1a in the advanced position, the wheel 1a, presumed the driving wheel, reached a surface sufficiently adherent, then the wheels 1b, 1c, 1d are mobilizing and by means of the traction forces of the wheels 1a and 1b, possibly with by means of the traction forces of the wheels 1c and 1d if the wheels 1c and 1d are also driving wheels, it is tried the normal departing of the motor vehicle V from its place and its getting out of the area covered in mud, snow, ice, sand, etc where it had got stuck.
In the case in which the motor vehicle having the wheel 1a in the advanced position still cannot depart from its place, we move to the second step.
b) in the second step, the second moving device 5b is actuated so that the second front wheel 1b reaches, by moving the wheel 1b and keeping in place the chassis S, from the restrained position in the advanced position, as shown in figure 3. For executing this maneuver, it is possible that it is necessary that one or more of the other wheels 1b, 1c, 1d to be immobilized by breaking by means of the associated breaking device 3a, 3c, respectively 3d, and/or locked by means of the associated automatic wheelchocks 4a', 4a", 4c', 4c", respectively 4d', 4d". In the case when, as a consequence of this maneuver of moving the wheel 1b in the advanced position, the wheel 1b, presumed driving wheel, reached a surface sufficiently adherent, the wheels 1a, 1c, 1d are mobilizing and by means of the traction forces of both wheels 1b and 1a, possibly by means of the traction forces of the wheels 1c and 1d if the wheels 1c and 1d are also driving wheels, it is tried the normal departing of the motor vehicle V from its place and its getting out of the area where it had got stuck.
In the case in which the motor vehicle having the wheels 1a and 1b in the advanced position still cannot depart from its place, we move to the third step.
c) in the third step, the third moving device 5c is actuated so that the first rear wheel 1c reaches, by moving the wheel 1c and keeping in place the chassis S, from the advanced position in the restrained position, as shown in figure 4. For executing this maneuver, it is possible that it is necessary that one or more of the other wheels 1a, 1b, 1d to be immobilized by breaking by means of the associated breaking device 3a, 3b, respectively
3d, and/or locked by means of the associated automatic wheelchocks 4a", 4a", 4b', 4b", respectively 4d', 4d". In the case when, as a consequence of this maneuver of moving the wheel 1c in the restrained position, the wheel 1c reached a surface sufficiently adherent, the wheels 1a, 1b, 1d are mobilizing and by means of the traction forces of the wheels 1a and 1b, possibly with the help of the traction forces of the wheels 1c and 1d if the wheels 1c and 1d are also driving wheels, it is tried the normal departing of the motor vehicle V from its place and its getting out of the area covered in mud, snow, ice, etc. where it had got stuck.
In the case in which the motor vehicle having the wheels 1a and 1b in the advanced position and the wheel 1c in the restrained position still cannot depart from its place, we move to the fourth step.
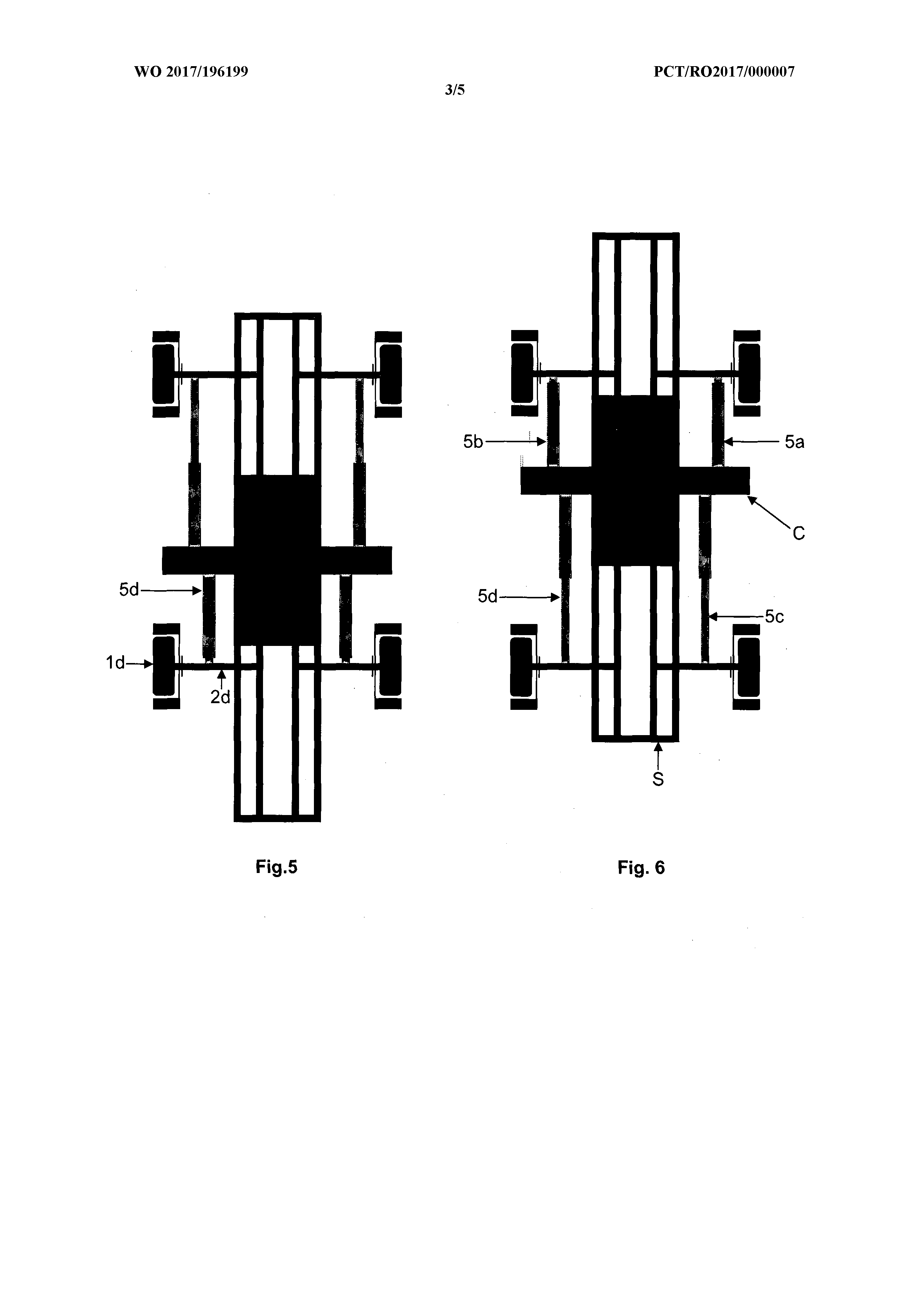
d) in the fourth step, the forth moving device 5d is actuated so that the second rear wheel 1d reaches, by moving the wheel 1d and keeping in place the chassis S, from the advanced position in the restrained position, as shown in figure 5. For executing this maneuver, it is possible that it is necessary that one or more of the other wheels 1 a, 1 b, 1 c to be immobilized by breaking by means of the associated breaking device 3a, 3b, respectively 3c, and/or locked by means of the associated automatic wheelchocks 4a', 4a", 4b', 4b", respectively 4c', 4c". In the case when, as a consequence of this maneuver of moving the wheel 1d in the restrained position, the wheel 1d reached a surface sufficiently adherent, the wheels 1a, 1b, 1c are mobilizing and with the help of the traction forces of the wheels 1a and 1b, possibly with the help of the traction forces of the wheels 1c and 1 d if the wheels 1c and 1d are also driving wheels, it is tried the departing of the motor vehicle V from its place and its getting out of the area covered in mud, snow, ice, etc. where it had got stuck.
In the case in which the motor vehicle having the wheels 1a and 1b in the advanced position and the wheels 1c and 1d in the restrained position still cannot depart from its place, we move to the fifth step.
e) in the fifth step, all the wheels 1a, 1b, 1c, 1d are immobilized by breaking by means of the associated breaking system device 3a, 3b, 3c respectively 3d and/or locked by means of the associated automatic wheelchocks 4a', 4a", 4b', 4b", 4c', 4c", respectively 4d', 4d", then the four moving devices 5a, 5b, 5c, 5d are actuated simultaneously so that the front wheels 1a, 1b reach from the advanced position in the restrained position, and the rear wheels 1c, 1d reach from the restrained position in the advanced position, which has as a direct consequence the moving of the chassis S relative to the four wheels 1a, 1b, 1c, 1d, as shown in figure 6.
We notice that figure 6 is identical to figure 1.
If, as shown in figure 2, we note with "d" the length of the distance between the advanced position and the restrained position of the wheel 1a, we notice that after carrying out the five steps a) - e), the motor vehicle advanced with the distance "d" from the initial place where it had got stuck.
In the case where after the fifth step e), the wheels still do not have enough adherence for the motor vehicle to depart normally from its place, we repeat again, in the same order, the steps a) - e) until the motor vehicle covers an adequate distance for reaching an area with a surface adherent enough for the vehicle to be able to depart normally (conventionally) from its place.
The motor vehicle according to the first embodiment may not be provided with planetaries/sun gears, groups or gearbox. In this case, the engine of the motor vehicle can actuate for instance an air compressor which at its turn actuates the moving means 5a, 5b, 5c, 5d.
The method is not limited to the strict succession of steps mentioned above. In other words, it is not compulsory that the moving means to be actuated in the order 5a - 5b - 5c - 5d - 5a simultaneously with 5b simultaneously with 5c simultaneously with 5d, but they can be actuated in different successions, for instance 5b - 5d - 5a - 5c - 5a simultaneously with 5b simultaneously with 5c simultaneously with 5d, or 5d - 5a - 5c -5b - 5a simultaneously with 5b simultaneously with 5c simultaneously with 5d, etc. Also, it is not compulsory that the initial position to be the one in which the wheels 1a and 1b are in the restrained position and the wheels 1c and 1d in the advanced position; it is possible that in the initial position the wheels 1a and 1b are in the advanced position and the wheels 1c and 1d are in the restrained position, and the moving devices to be actuated for example in the succession 5a simultaneously with 5b simultaneously with 5c simultaneously with 5d - 5a - 5b - 5c - 5d.
In the case when, after the motor vehicle succeeded in unblocking itself, the front wheels or the rear wheels are not aligned (meaning that one is in the restrained position and the other is in the advanced position), it is obvious that for continuing the travel, the driver can control the alignment of the respective wheels.
Also, the motor vehicle is not limited to two pairs of wheels (two front wheels and two rear wheels) but it can be provided with any number of pairs of wheels as necessary, depending on the practical needs. In this case, it is obvious that the motor vehicle will be provided with an adequate number of moving devices, enough for the motor vehicle to be able to move according to the method presented above. The moving method remains the same as a principle, only the number of steps increases in proportion to the number of the added moving devices.
An alternative moving method of the motor vehicle is the following: when the position of the wheels is that from figure 5, it can supplementary be used the inertia of the motor vehicle: the driver breaks and the locks the wheels 1a, 1b, 1c, 1d. Immediately after, the moving devices 5a, 5b, 5c, 5d are strongly and simultaneously actuated. The wheels being blocked (immobilized), it results that the chassis of the motor vehicle will advance. When the chassis comes close to the point in which the wheels 1a and 1b return to the restrained position and the wheels 1c and 1d in the advanced position, the wheels 1a, 1b, 1c, 1d are unblocked. Then, with all the wheels mobile, the motor vehicle has enough inertia for going forward with the wheels 1a and 1b in restrained position and with the wheels 1c and 1d in advanced position. At a certain point, while the motor vehicle rolls forward by inertia, the driver slightly and simultaneously actuates the moving devices 5a, 5b, 5c, 5d and slowly brings the wheels 1a and 1b in the advanced position and the wheels 1c and 1d in restrained position. As a consequence, the wheels are back again like in figure 5, with the difference that the motor vehicle is moving. Now, without blocking the wheels, the moving devices 5a, 5b, 5c, 5d are simultaneously actuated in order to bring the wheels 1a and 1b in restrained position and the wheels 1c and 1d in advanced position. As the wheels 1a, 1b, 1c, 1d are moving, so they have inertia, when the moving devices 5a, 5b, 5c, 5d are strongly and simultaneously actuated, they will force the motor vehicle to increase its speed, even if, now, these devices do not push in the 4 blocked wheels but only in the inertia of the wheels 1a, 1b, 1c, 1d. After the wheels 1a and 1b reached the restrained position and the wheels 1c and 1d the advanced position, we notice that the speed of the motor vehicle increased. The moving devices 5a, 5b, 5c, 5d are simultaneously actuated in order to bring the wheels 1a and 1b in the advanced position and the wheels 1c and 1d in the restrained position. We notice that the position of the wheels is again like in figure 5, but the speed of the car is much higher. All the process is repeated, with the same support of the inertia of the wheels, until the motor vehicle is brought at the desired speed (for example the maximum speed). When the desired speed is reached, the motor vehicle can maintain this speed even without having to slide all four wheels. It is possible to be able to get to another succession of the sliding of the wheels or it is possible to actuate sporadically and simultaneously the moving devices 5a, 5b, 5c, 5d.
Also, the motor vehicle can depart from its place and accelerate after that with another succession of carrying out the steps. For example, we can control each wheel in turn, etc. In the previous paragraph, by "powerful" actuating a moving device we understand the application by the moving device of the maximum or almost maximum force to the associated axle, and by "slightly" actuating of a moving device we understand the application by the moving device of a minimum or almost minimum force to the associated axle.
In the second embodiment of the motor vehicle according to the invention, presented schematically in figures 7-9, the motor vehicle V is provided with a pair of front wheels 1a, 1b and a pair of rear wheels 1c, 1d, the pair of front wheels being mounted on a common axle 2a, the pair of rear wheels being mounted on a common axle 2c. The wheels 1a, 1b, 1c, 1d are provided each respectively with a breaking device 3a, 3b, 3c, 3d. Preferably, each wheel can be further provided with two automatic wheelchocks 4a', 4a", 4b', 4b", 4c', 4c", 4d', 4d" which can block the wheel in the sense of rolling forward, respectively in the sense of rolling backwards of the motor vehicle.
One of the axles, for example the rear axle 2c, is actuated by a moving device 5 fixed at one of its ends on the axle 2c and fixed at its other end on a body C fixed solidarly on the chassis S of the motor vehicle. In this second embodiment, the moving assembly consists of a single moving device. The body C, being fixed solidarly on the chassis S, always moves or stays still together with the chassis S. By means of the moving device 5, the axle 2c can slide in the straight line moving direction of the motor vehicle V, on a sliding support 6 fixed solidarly on the chassis S, thus making the wheels 1c, 1d able to move simultaneously in the straight line moving direction of the motor vehicle V, between a first extreme position, named hereinafter the restrained position, in which the wheels 1c, 1d are situated at a minimum distance relative to the body C and a second extreme position named hereinafter the advanced position, in which the wheels 1c, 1d are situated at a maximum distance relative to the body C.
When the wheels 1c, 1d are immobilized and the wheels 1a, 1b are free (mobile), the moving assembly comprising the moving device 5 can move the chassis S in the straight line moving direction of the motor vehicle V, relative to the pair of wheels 1c, 1d, the axle and the ground clearance of the motor vehicle V remaining unmodified, all the time and irrespective of the position of the wheels.
In normal traffic conditions, the motor vehicle V can roll for example with the wheels 1c and 1d in advanced position, as shown in figure 7.
In certain cases, the motor vehicle can get stuck (for example with the wheels in the position from figure 7), for example because of the skidding of the wheels on a surface covered in mud, snow, ice, sand, or on a slope/ramp, etc. In such cases, the motor vehicle according to the second embodiment cannot depart from its place in the normal (conventional) way, but it has the possibility of moving sequentially according to the following method:
a) In the first step, the moving device 5 is actuated so that the rear wheels 1c, 1d reach, by maintaining the chassis S still, from the advanced position in the restrained position, as shown in figure 8. For executing this maneuver, it is possible to be necessary that one or more of the other wheels 1a, 1b to be immobilized by breaking by means of the associated breaking system 3a respectively 3b and/or by blocking by means of the associated automatic wheelchocks 4a', 4a" respectively 4b', 4b".
b) In the second step, the wheels 1a, 1b are mobile and the wheels 1c, 1d are immobilized by breaking by means of the associated breaking device 3c respectively 3d and/or by blocking by means of the associated automatic wheelchocks 4c', 4c", 4d', 4d".
c) In the third step the moving system 5 is actuated so that the wheels 1a, 1b and the chassis S move relative to the immobilized wheels 1c, 1d, and the immobilized wheels 1c, 1d reach from the restrained position in the advanced position, as shown in figure 9. In the case when the wheels 1a and 1b are driving wheels, in this third step, simultaneously with the actuating of the moving device 5 we can use also the traction forces of the wheels 1a and 1b for moving the wheels 1a, 1b and the chassis S.
We notice that figure 9 is identical to figure 7.
At the end of the third step, the motor vehicle covered a distance equal with the length of the distance between the advanced position and the restrained position.
In case that after the third step c), the motor vehicle still cannot depart normally from its place, the steps a) - c) are repeated again, in order, until the motor vehicle covers an adequate distance to reach an area with a surface adherent enough for the motor vehicle to depart normally from its place.
The moving method of the motor vehicle according to the second embodiment is not limited to the strict succession of the steps mentioned above.
It is obvious that the motor vehicle according to the first or the second embodiment can be equipped with absolutely any specific element of a motor vehicle with at least four wheels known in the art, such as: booth, on-board computer, stirring-wheel, trunk, doors, windscreen, lights, etc.
In the third embodiment of the motor vehicle according to the invention, shown schematically in figures 10-12, the motor vehicle V is equipped with a single front wheel 1a mounted on an axle 2a and a single rear wheel 1c mounted on a axle 2c. The motor vehicle according to the third embodiment can be for example a motorbike. The wheels 1a and 1c are each provided with respectively a breaking device 3a, 3c. Preferably, each wheel can be further provided with two automatic wheelchocks 4a', 4a", 4c', 4c" that can block the wheel in the sense of rolling forward, respectively in the sense of rolling backwards of the motor vehicle.
One of the axles, for example the rear axle 2c, is actuated by a moving device 5 fixed at one of its ends to the axle 2c and fixed at its other end to a body C fixed solidarly on the chassis S of the motor vehicle. In this third embodiment, the moving assembly consists of a single moving device. The body C, being fixed solidarly on the chassis S, always moves or stays still together with the chassis S. By means of the moving device 5, the axle 2c can slide in the straight line moving direction of the motor vehicle V, thus making the wheel 1c to be able to move simultaneously in the straight line moving direction of the motor vehicle V, between a first extreme position named hereinafter the restrained position, in which the wheel 1c is situated at a minimum distance relative to the body C and a second extreme position named hereinafter the advanced position, in which the wheel 1c is situated at a maximum distance relative to the body C.
When the wheel 1c is immobilized and the wheel 1a is free (mobile), the moving assembly comprising the moving device 5 can move the chassis S in the straight line moving direction of the motor vehicle V, relative to the wheel 1c, the track and the ground clearance of the motor vehicle V remaining unmodified, all the time and irrespective of the position of the wheels. In normal traffic conditions, the motor vehicle V can roll for example with the wheel 1c in restrained position, as shown in figure 10.
In certain cases, the motor vehicle can get stuck (for example with the wheels
position from figure 10), for example because of the skidding of the wheels on a surface covered in mud, snow, ice, sand, or on a slope/ramp, etc. In such cases, the motor vehicle according to the third embodiment cannot depart from its place in the normal (conventional) way, but it has the possibility of moving sequentially according to the following method:
a) in the first step, with the wheel 1a mobile, the wheel 1c is immobilized by breaking, by means of the associated breaking device 3c and/or by blocking by means of the associated automatic wheelchocks 4c', 4c".
b) in the second step (figure 11), the moving device 5 is actuated so that, by moving the chassis S simultaneously with the staying still of the wheel 1c, the rear wheel 1c reaches from the restrained position in the advanced position.
c) In the third step (figure 12) the wheel 1c is rendered mobile, possibly the wheel 1a is immobilized by breaking by means of the associated breaking system 3a and/or by blocking by means of the associated automatic wheelchocks 4a', 4a" and the moving device 5 is actuated so that the wheel 1c moves relative to the body C and the chassis S, reaching from the advanced position in the restrained position. In this third step, simultaneously with the actuating of the moving device 5 the traction forces of the wheels 1a and 1c can also be used in order to try to depart the motor vehicle V normally from its place.
We notice that figure 10 is identical to figure 12.
At the end of the third step, the motor vehicle advanced with a distance equal to the length of the distance between the advanced position and the restrained position.
In case that after the third step c), the motor vehicle cannot depart normally from its place, then the steps a) - c) are repeated again, in order, until the motor vehicle covers an adequate distance to reach an area with a surface adherent enough for the motor vehicle to start normally from its place.
The moving method of the motor vehicle according to the third embodiment is not limited to the strict succession of the steps mentioned above.
It is obvious that the motor vehicle according to the third embodiment can be equipped with absolutely any specific element of a motor vehicle with two wheels known in the art, such as: saddle, handlebar, lights, mirrors, etc.
The moving method of the motor vehicle according to any of the embodiments is not
limited to the moving on the "forward" sense, but it can be applied obviously at the moving on the "backwards" sense of rolling of the motor vehicle.
Also, the moving method of the motor vehicle according to any of the embodiments is not limited to the rolling on a horizontal surface, being able to apply successfully at the rolling on a slope/ramp, for example on a slope/ramp with a declivity of over 45°.
In all the three embodiments of the invention, the motor vehicle is practically equipped with a moving system that contains: i) the wheels, ii) the axles, the breaking systems and the blocking wheelchocks associated to the wheels and iii) the moving assembly fixed at a body that is solidary with the chassis of the motor vehicle.

